6.1 Quasimatrices and spy
A chebfun can have more than one column, or if it is transposed, it can have more than one row. In these cases we get a quasimatrix, a "matrix" in which one of the dimensions is discrete as usual but the other is continuous. Our default choice will be that of an " $\infty\times n$ " quasimatrix consisting of $n$ columns, each of which is a chebfun. When it is important to specify the orientation we use the term column quasimatrix or row quasimatrix.
Here for example is the quasimatrix consisting of the first six powers of $x$ on the interval $[-1,1]$. The command size can be used to identify the continuous dimension, and to find the numbers of rows or columns:
x = chebfun('x');
A = [1 x x^2 x^3 x^4 x^5];
size(A)
size(A,2)
ans =
Inf 6
ans =
6
Here is the third column of $A$ evaluated at the point $x=0.5$:
A(0.5,3)
ans = 0.250000000000000
Here are the column sums, i.e., the integrals of $1, x,\dots, x^5$ from $-1$ to $1$:
format short, sum(A), format long
ans =
2.0000 0 0.6667 0 0.4000 0
And here is a plot of the columns:
plot(A), grid on, ylim([-1.1 1.1])
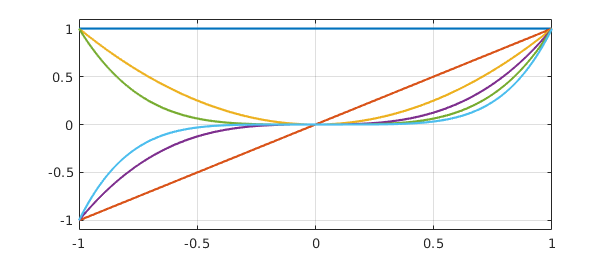
The term quasimatrix comes from [Stewart 1998], and the same idea appears with different terminology in [de Boor 1991] and [Trefethen & Bau 1997, pp. 52-54]. The idea is a natural one, since so much of applied linear algebra deals with discrete approximations to the continuous, but it seems not to have been discussed explicitly very much until the appearance of Chebfun [Battles & Trefethen 2004, Battles 2006].
If f and g are column chebfuns, then f'*g is a scalar, their inner product. For example, here is the inner product of $x^2$ and $x^4$ over $[-1,1]$ (equal to $2/7$):
A(:,3)'*A(:,5)
ans = 0.285714285714286
More generally, if A and B are column quasimatrices with $m$ and $n$ columns, respectively, then A'*B is the $m \times n$ matrix of inner products of those columns. Here is the $6\times 6$ example corresponding to $B=A$:
format short, A'*A, format long
ans =
2.0000 0.0000 0.6667 -0.0000 0.4000 -0.0000
0.0000 0.6667 -0.0000 0.4000 -0.0000 0.2857
0.6667 -0.0000 0.4000 0.0000 0.2857 0
0.0000 0.4000 -0.0000 0.2857 0.0000 0.2222
0.4000 -0.0000 0.2857 0.0000 0.2222 0
0.0000 0.2857 0.0000 0.2222 -0.0000 0.1818
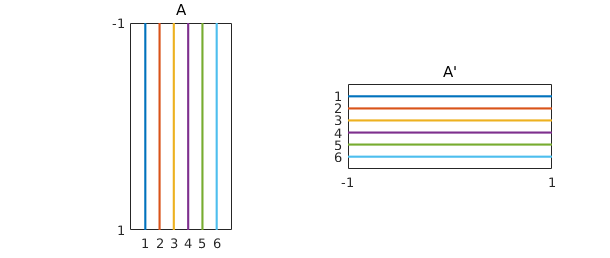
You can get an idea of the shape of a quasimatrix with the overloaded spy command
subplot(1,2,1), spy(A), title A
subplot(1,2,2), spy(A'), title('A''')
6.2 Backslash, least-squares, and polyfit
In MATLAB, the command c = A\b computes the solution to the system of equations $Ac = b$ if $A$ is a square matrix, whereas if $A$ is rectangular, with more rows than columns, it computes the least squares solution, the vector $c$ that minimizes $|Ac-b|$. A quasimatrix is always rectangular, and \ has accordingly been overloaded to carry out the appropriate continuous least-squares computation. (The actual MATLAB command that handles backslash is mldivide.)
For example, continuing with the same chebfun x and quasimatrix A as above, consider the following sequence:
f = exp(x)*sin(6*x); c = A\f
c = 0.309654988398406 4.640757102742466 -2.157249816336408 -20.041645425109170 1.073963006923381 15.477982292828022
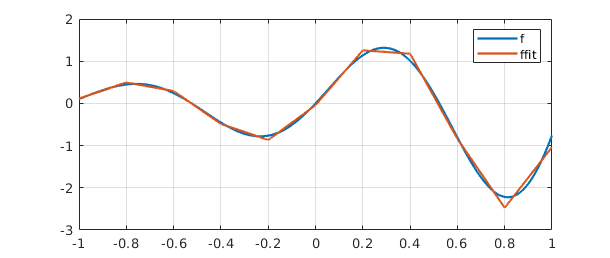
The vector $c$ can be interpreted as the vector of coefficients of the least-squares fit to $f$ by a linear combination of the functions $1, x,\dots, x^5$. Here is a plot of $f$ and its least-squares approximation, which we label ffit.
ffit = A*c;
clf, plot([f ffit]), grid on
legend({'f','ffit'})
error = norm(f-ffit)
error = 0.356073976001434
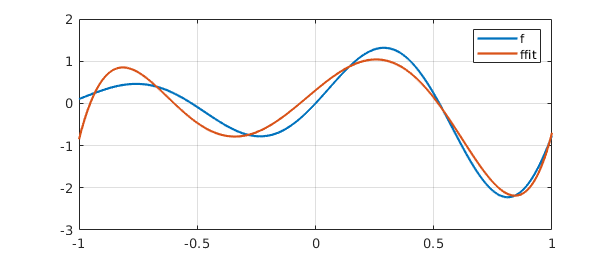
It is a general result that the least-squares approximation by a polynomial of degree $n$ to a continuous function $f$ must intersect $f$ at least $n+1$ times in the interval of approximation.
If you want to do least-squares fitting by polynomials in Chebfun, there is no need to set up a quasimatrix as we did above. Instead, you can use the Chebfun polyfit command, like this:
ffit_polyfit = polyfit(f,5); norm(ffit-ffit_polyfit)
ans =
2.429368357357407e-15
polyfit can be used both for fittting a function, as here, or for fitting data. See the Chebfun examples "Least-squares approximation in Chebfun," in the approx section , and "Least-squares data fitting and polyfit," in the stats section. polyfit will also fit periodic functions by trigonometric polynomials.
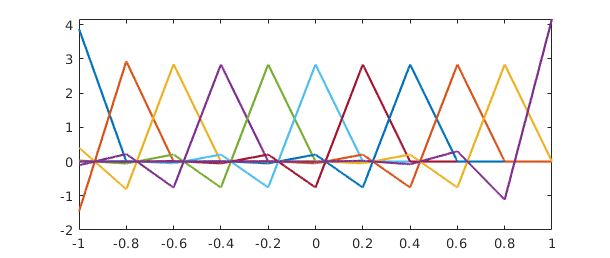
For fitting by functions that are not just polynomials or trigonometric polynomials, however, you need a quasimatrix. Here is an example in which the columns correspond to hat functions located at points equally spaced from $-1$ to $1$, realized as piecewise smooth chebfuns.
A2 = [];
for j = 0:10
xj = -1 + j/5;
A2 = [A2 max(0,1-5*abs(x-xj))];
end
plot(A2)
set(gca,'xtick',-1:.2:1)
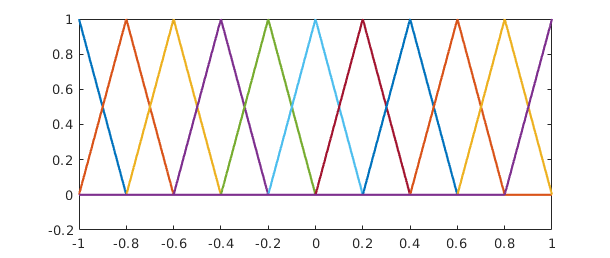
A linear combination of these columns is a piecewise linear function with breakpoints at $-0.8, -0.6,\dots,0.8$. Here is the least-squares fit by such functions to $f$. Remember that although we happen to be fitting here by a function with a discrete flavor, all the operations are continuous ones involving integrals, not point evaluations.
c = A2\f;
ffit = A2*c;
plot([f ffit]), grid on
legend({'f','ffit'})
set(gca,'xtick',-1:.2:1)
error = norm(f-ffit)
error = 0.089306812087670
6.3 QR factorization
Matrix least-squares problems are ordinarily solved by QR factorization, and in the quasimatrix case, they are solved by quasimatrix QR factorization. This is the technology underlying the backslash operator described in the last section.
A quasimatrix QR factorization takes this form: $$ A = QR, $$ with $$ A:~ \infty\times n, \quad Q: ~ \infty\times n, \quad R: ~ n\times n. $$ The columns of $A$ are arbitrary, the columns of $Q$ are orthonormal, and $R$ is an $n\times n$ upper-triangular matrix. This factorization corresponds to what is known in various texts as the "reduced," "economy size," "skinny," "abbreviated," or "condensed" QR factorization, since $Q$ is rectangular rather than square and $R$ is square rather than rectangular. In MATLAB the syntax for computing such things is [Q,R] = qr(A), and the same command has been overloaded for chebfuns. The computation makes use of a quasimatrix analogue of Householder triangularization [Trefethen 2010]. Alternatively one can simply write [Q,R] = qr(A):
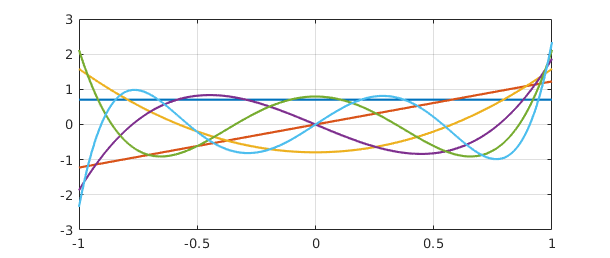
[Q,R] = qr(A); plot(Q), grid on
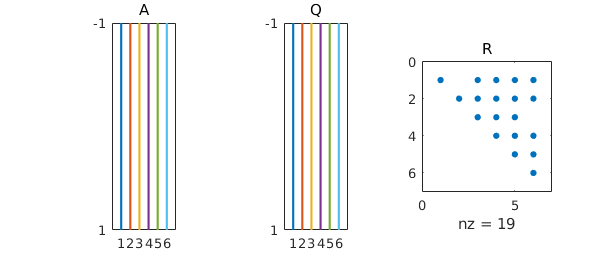
The spy command confirms the shape of these various matrices. In principle half the dots in the upper-triangle should be zero because of the fact that the columns of $A$ alternate even and odd functions, but rounding errors introduce nonzeros.
subplot(1,3,1), spy(A), title A subplot(1,3,2), spy(Q), title Q subplot(1,3,3), spy(R), title R
The plot shows orthogonal polynomials, namely the orthogonalizations of the monomials $1, x,\dots,x^5$ over $[-1,1]$. These are the famous Legendre polynomials $P_k$ [Abramowitz & Stegun 1972], except that the latter are conventionally normalized by the condition $P(1) = 1$ rather than by having norm $1$. We can renormalize to impose this condition as follows:
for j = 1:size(A,2)
R(j,:) = R(j,:)*Q(1,j);
Q(:,j) = Q(:,j)/Q(1,j);
end
clf, plot(Q), grid on
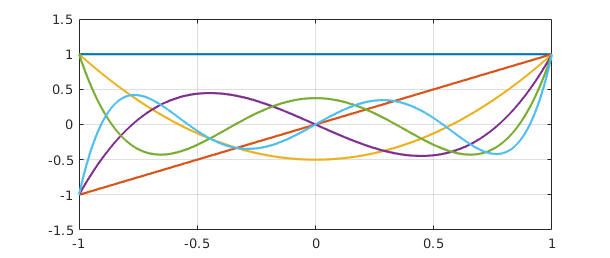
(A slicker way to produce this plot in Chebfun would be to execute plot(legpoly(0:5)).)
If $A=QR$, then $A R^{-1} = Q$, and here is $R^{-1}$:
format short, inv(R), format long
ans =
1.0000 0 -0.5000 -0.0000 0.3750 -0.0000
0 1.0000 0.0000 -1.5000 0.0000 1.8750
0 0 1.5000 0.0000 -3.7500 -0.0000
0 0 0 2.5000 -0.0000 -8.7500
0 0 0 0 4.3750 0.0000
0 0 0 0 0 7.8750
Column $k$ of $R^{-1}$ is the vector of coefficients of the expansion of column $k$ of $Q$ as a linear combination of the columns of $A$, that is, the monomials $1, x, x^2,\dots.$ In other words, column $k$ of $R^{-1}$ is the vector of coefficients of the degree $k$ Legendre polynomial. For example, we see from the matrix that $P_3(x) = 2.5x^3 - 1.5x$.
Here is what the hat functions look like after orthonormalization:
[Q2,R2] = qr(A2); plot(Q2) set(gca,'xtick',-1:.2:1)
6.4 svd, norm, cond
An $m\times n$ matrix $A$ defines a map from $R^n$ to $R^m$, and in particular, $A$ maps the unit ball in $R^n$ to a hyperellipsoid of dimension $\le n$ in $R^m$. The (reduced, skinny, condensed, $\dots$ ) SVD or singular value decomposition exhibits this map by providing a factorization $AV = US$ or equivalently $A = USV^*$, where $U$ is $m\times n$ with orthonormal columns, $S$ is diagonal with nonincreasing nonnegative diagonal entries known as the singular values, and $V$ is $n\times n$ and orthogonal. $A$ maps $v_j$, the $j$ th column of $V$ or the $j$ th right singular vector, to $s_j$ times $u_j$, the $j$ th column of $U$ or the $j$ th left singular vector, which is the vector defining the $j$ th largest semiaxis of the hyperellipsoid. See Chapters 4 and 5 of [Trefethen & Bau 1997].
If $A$ is an $\infty \times n$ quasimatrix, everything is analogous: $$ A = USV^T, \qquad A: \infty \times n,~~ U: \infty \times n, ~~ S: n \times n, ~~ V: n \times n. $$ The image of the unit ball in $R^n$ under $A$ is still a hyperellipsoid of dimension $\le n$, which now lies within an infinite-dimensional function space. The columns of $U$ are orthonormal functions and $S$ and $V$ have the same properties as in the matrix case.
For example, here are the singular values of the matrix $A$ defined earlier with columns $1,x,\dots,x^5$:
s = svd(A)
s = 1.532062889375341 1.032551897396700 0.518125864967969 0.258419769500035 0.080938947808205 0.035425077461572
The largest singular value is equal to the norm of the quasimatrix, which is defined by $|A| = \max_x |Ax| / |x|$.
norm(A,2)
ans = 1.532062889375341
(Note that we must include the argument 2 here: for reasons of speed, the default for quasimatrices, unlike the usual MATLAB matrices, is the Frobenius norm rather than the 2-norm.) The SVD enables us to identify exactly what vectors are involved in achieving this maximum ratio. The optimal vector $x$ is $v_1$, the first right singular vector of $A$,
[U,S,V] = svd(A); v1 = V(:,1)
v1 = 0.913034433780914 -0.000000000000000 0.344611116356111 -0.000000000000000 0.218200140270718 0.000000000000000
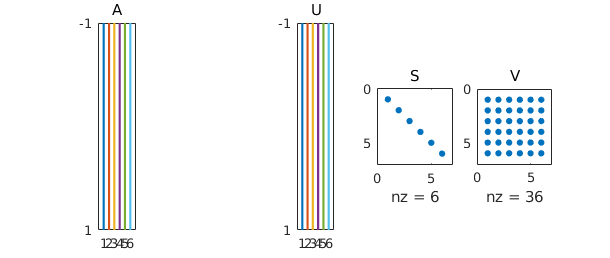
We can use spy to confirm the shapes of the matrices. As with spy® earlier, here spy(V) should in principle show a checkerboard, but nonzeros are introduced by rounding errors.
subplot(1,5,1), spy(A), title A subplot(1,5,3), spy(U), title U subplot(1,5,4), spy(S), title S subplot(1,5,5), spy(V), title V
We confirm that the norm of $v_1$ is $1$:
norm(v1)
ans =
1
This vector is mapped by $A$ to the chebfun $s_1u_1$:
u1 = U(:,1); norm(u1)
ans =
1
s1 = S(1,1)
s1 = 1.532062889375341
norm(A*v1)
ans = 1.532062889375341
norm(A*v1-s1*u1)
ans =
3.442062136703695e-16
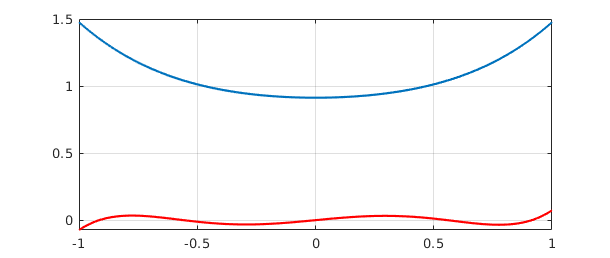
Similarly, the minimal singular value and corresponding singular vectors describe the minimum amount that $A$ can enlarge an input. The following commands plot the extreme functions $Av_1$ (blue) and $Av_n$ (red). We can interpret these as the largest and smallest degree $5$ polynomials, as measured in the $2$-norm over $[-1,1]$, whose coefficient vectors have $2$-norm equal to $1$.
clf, plot(A*v1), grid on, hold on vn = V(:,end); plot(A*vn,'r'), hold off
The ratio of the largest and smallest singular values --- the eccentricity of the hyperellipsoid --- is the condition number of $A$:
max(s)/min(s)
ans = 43.247975704139819
cond(A)
ans = 43.247975704139819
The fact that cond(A) is a good deal greater than $1$ reflects the ill-conditioning of the monomials $1,x,\dots ,x^5$ as a basis for degree $5$ polynomials in $[-1,1]$. The effect becomes rapidly stronger as we take more terms in the sequence:
cond([A x^6 x^7 x^8 x^9 x^10 x^11 x^12 x^13 x^14 x^15])
ans =
2.298938277185585e+05
By contrast a quasimatrix formed of suitably normalized Legendre polynomials has condition number $1$, since they are orthonormal:
cond(legpoly(0:15,'norm'))
ans = 1.000000000000001
A quasimatrix of Chebyshev polynomials doesn't quite achieve condition number $1$, but it comes close:
cond(chebpoly(0:15))
ans = 4.597747107616715
Chebyshev polynomials form an excellent basis for expansions on $[-1,1]$, a fact that is at the heart of Chebfun.
6.5 Other norms
The definition $|A| = \max_x |Ax|/|x|$ makes sense in other norms besides the $2$-norm, and the particularly important alternatives are the $1$-norm and the $\infty$-norm. The 1-norm of a column quasimatrix is the "maximum column sum," i.e., the maximum of the 1-norms of its columns. In the case of our quasimatrix $A$, the maximum is attained by the first column, which has norm $2$:
norm(A,1)
ans =
2
The $\infty$-norm is the "maximum row sum," which for a column quasimatrix corresponds to the maximum of the chebfun obtained by adding the absolute values of the columns. In the case of $A$, the sum is $1+|x|+\cdots +|x|^5$, which attains its maximum value $6$ at $x=-1$ and $1$:
norm(A,inf)
ans =
6
The norms of row quasimatrices are analogous, with norm(A',inf) = norm(A,1) and norm(A',1) = norm(A,inf). Like MATLAB itself applied to a rectangular matrix, Chebfun does not define cond(A,1) or cond(A,inf) if A is a quasimatrix.
The Frobenius or Hilbert-Schmidt norm is equal to the square root of the sum of the squares of the singular values:
norm(A,'fro')
ans = 1.938148951041007
6.6 rank, null, orth, pinv
Chebfun also contains overloads for some further MATLAB operations related to orthogonal matrix factorizations. Perhaps the most useful of these is rank(A), which computes the singular values of $A$ and makes a judgement as to how many of them are significantly different from zero. For example, with $x$ still defined as before, here is an example showing that the functions $1,$ $\sin(x)^2$, and $\cos(x)^2$ are linearly dependent:
B = [1 sin(x)^2 cos(x)^2]; rank(B)
ans =
2
Since $B$ is rank-deficient, is has a nontrivial nullspace, and the command null(B) will find an orthonormal basis for it:
null(B)
ans = -0.577350269189626 0.577350269189626 0.577350269189626
Similarly the command orth(B) finds an orthonormal basis for the range of B, which in this case has dimension $2$:
orth(B)
ans =
chebfun column1 (1 smooth piece)
interval length endpoint values
[ -1, 1] 19 0.61 0.61
vertical scale = 0.76
chebfun column2 (1 smooth piece)
interval length endpoint values
[ -1, 1] 19 -1.4 -1.4
vertical scale = 1.4
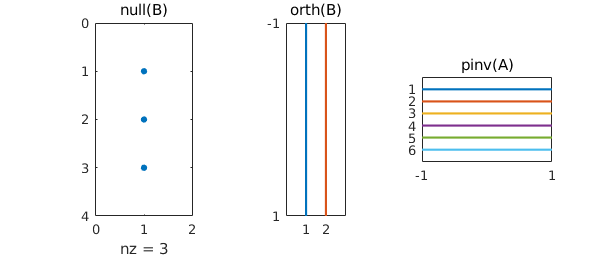
If A is an $\infty\times n$ column quasimatrix, the command pinv(A) computes the pseudoinverse of A, an $n \times \infty$ row quasimatrix such that pinv(A)*c = A\c.
Here is a summary of the dimensions of these objects:
subplot(1,3,1), spy(null(B)), title null(B) subplot(1,3,2), spy(orth(B)), title orth(B) subplot(1,3,3), spy(pinv(A)), title pinv(A)
6.7 Array-valued chebfuns vs. arrays of chebfuns
In Chebfun, quasimatrices are actually implemented in two different ways. When its columns are smooth functions, a quasimatrix is normally represented as an array-valued chebfun. If a quasimatrix has singularities, or breakpoints that differ from one column to another, it is represented in a different fashion as an array of chebfuns. This representation is more flexible, though slower for some operations. In principle, users should never see the difference.
6.8 References
[Abramowitz & Stegun 1972] M. A. Abramowitz and I. A. Stegun, eds., Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables, 9th printing, Dover, 1972.
[Battles 2006] Z. Battles, Numerical Linear Algebra for Continuous Functions, DPhil thesis, Oxford University Computing Laboratory, 2006.
[Battles & Trefethen 2004] Z. Battles and L. N. Trefethen, "An extension of Matlab to continuous functions and operators," SIAM Journal on Scientific Computing, 25 (2004), 1743-1770.
[de Boor 1991] C. de Boor, "An alternative approach to (the teaching of) rank, basis, and dimension," Linear Algebra and its Applications, 146 (1991), 221-229.
[Stewart 1998] G. W. Stewart, Afternotes Goes to Graduate School: Lectures on Advanced Numerical Analysis, SIAM, 1998.
[Trefethen 2008] L. N. Trefethen, "Householder triangularization of a quasimatrix," IMA Journal of Numerical Analysis, 30 (2010), 887-897.
[Trefethen & Bau 1997] L. N. Trefethen and D. Bau, III, Numerical Linear Algebra, SIAM, 1997.