The AAA algorithm, the FFT, and Vandermonde with Arnoldi can be effectively employed together for modelling LTI (Linear Time-Invariant) systems from their response to standard input signals, typically step functions, which is a common practice in engineering. This example is a companion, and complement, to the previous "The AAA algorithm for system identification".
tic
The following is a LTI system transfer function in the Laplace domain, featuring an undamped oscillating component: $$ G(s) = \frac{(1+105s)(1+\frac{1.4}{0.05}s+ \frac{1}{0.05^2}s^2)}{(1+100s)(1+\frac{1.4}{0.04}s+\frac{1}{0.04^2}s^2)(1+0.4s^2)}. $$
Num = @(s) (1+105*s).*(1+28*s+400*s.^2); Den = @(s) (1+100*s).*(1+35*s+625*s.^2).*(1+0.4*s.^2); G = @(s) Num(s)./Den(s); % system transfer function Stp = @(s) 1./s; % L-transform of unit step
Here are the numerical conditions:
Fs = 128; % sampling frequency t = [0:1/Fs:20-1/Fs]; % time interval L = length(t); % nr. of samples w = logspace(-4,2,6000); % frequency interval warning off
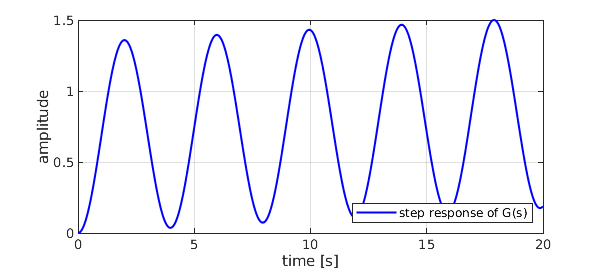
We compute the step response in the Laplace domain and AAA-approximate the result to find the poles; samples are mirrored in order to enforce symmetry. Hence the signal in the time domain: $$ {\mathcal{L}}^{-1} \left( \sum_n\frac{c_n}{s-a_n}\right) = \sum_n c_n\,e^{a_nt}. $$ Note that the effect of the dominant conjugate poles is almost completely obfuscated by the undamped oscillations due to the purely complex pair.
GS = Stp(1i*w).*G(1i*w);
[~,polG,resG] = aaa([fliplr(conj(GS)) GS],1i*[-fliplr(w) w],'lawson',0);
[~,k] = min(abs(polG)); polG(k) = 0 % fix pole of step input
polG = polG.'; resG
g = @(x) real(exp(x(:)*polG)*resG); % step response
LW = 'linewidth'; MS = 'markersize'; LO = 'location';
SE = 'southeast'; SW = 'southwest'; NE = 'northeast';
plot(t,g(t),'b-',LW,1.5), grid on, xlabel('time [s]'), ylabel('amplitude'),
legend('step response of G(s)',LO,SE)
polG = -0.000000000000000 - 1.581138830084190i 0.000000000000000 + 1.581138830084190i -0.027999999999557 + 0.028565713714499i -0.027999999999914 - 0.028565713713914i -0.009999999999644 + 0.000000000000123i 0.000000000000000 + 0.000000000000000i resG = -0.335984743382328 - 0.002876336047530i -0.335984743382313 + 0.002876336047561i -0.190680856654865 + 0.018361920801138i -0.190680856662364 - 0.018361920799351i 0.053331200081669 - 0.000000000001818i 0.999999999999997 - 0.000000000000006i
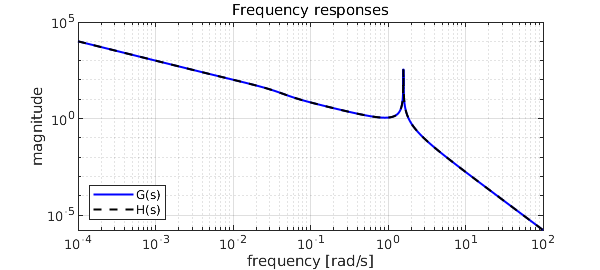
Laplace becomes Fourier along the imaginary axis: $$ {{L}}{g(t)}(s=j\omega) = {{F}}{g(t)}(\omega). $$ We extract the single-sided spectrum from the FFT and AAA-approximate it. We don't even need to restrict the maximum degree, notwithstanding the low coefficient number. All poles are caught nicely, and the AAA-LS procedure [1] can be applied to identify our approximation $H(s)$.
Y = fft(g(t)).'; hY = Y(1:L/2+1)/L; F = 2*pi*Fs*(0:L/2)/L; fft_length = int16(length(hY)) [~,polH] = aaa([fliplr(conj(hY)) hY],[-fliplr(1i*F) 1i*F],'lawson',0); polH = roots(real(poly(polH))); % pole recomputation k = find(real(polH)>0); polH(k) = -polH(k)'; % force system stability, Re>0 polH(abs(polH)>max(F)) = []; % expunge nonsense frequencies [~,k] = min(abs(polH)); polH(k) = 0 % fix pole of step input
fft_length = int16 1281 polH = -0.000000000000013 + 1.581138830084215i -0.000000000000013 - 1.581138830084215i -0.027999977368235 + 0.028565697470774i -0.027999977368235 - 0.028565697470774i -0.010000470363508 + 0.000000000000000i 0.000000000000000 + 0.000000000000000i
Here's a better idea: let's do LS directly on the original signal, and exploit all available data to recompute residues!
Q = exp(t(:)*polH.');
resH = Q\g(t)
H = @(s) 1./(s(:)-polH.')*resH; % identified LTI system
h = @(x) (exp(x(:)*polH.'))*resH; % step response of identified system
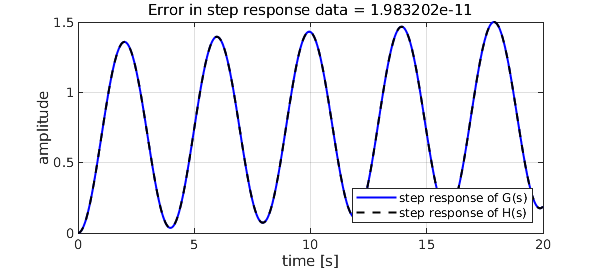
err = norm(abs(g(t)-h(t)),inf) % deviation from original step response
hold on, plot(t,h(t),'k--',LW,1.5), hold off
title(sprintf('Error in step response data = %d',err))
legend('step response of G(s)','step response of H(s)',LO,SE)
snapnow
loglog(w,abs(GS),'b-',LW,1.5), hold on
loglog(w,abs(H(1i*w)),'k--',LW,1.5), grid on, hold off
title(sprintf('Frequency responses')), legend('G(s)','H(s)',LO,SW)
xlabel('frequency [rad/s]'), ylabel('magnitude')
resH =
-0.335984743381428 + 0.002876336047579i
-0.335984743381427 - 0.002876336047579i
-0.190681292794270 + 0.018361729769863i
-0.190681292794270 - 0.018361729769867i
0.053331419584089 + 0.000000000000012i
1.000000652747271 - 0.000000000000007i
err =
1.983202491148154e-11
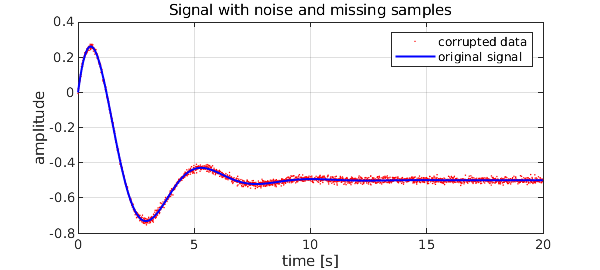
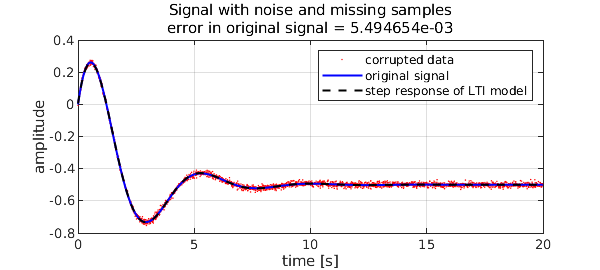
The reconstruction works effectively also in the presence of noisy or missing data. Consider the scalar example with noise found in [2], an LTI system with the following step response in the time domain: $$ {\mathcal{L}}^{-1} \left( \frac{1}{s}\frac{s-1}{s^2+s+2} \right) = \frac{e^{-t/2}\left(5\sin(\sqrt7t/2)+\sqrt7\cos(\sqrt7t/2)\right)}{2\sqrt7}-\frac{1}{2}. $$ The original system poles are a complex conjugate pair:
poles = roots([1 1 2])
poles = -0.500000000000000 + 1.322875655532295i -0.500000000000000 - 1.322875655532295i
We pollute the signal with normally distributed noise with a standard deviation of $10^{-2}$, and drop a random 15% of samples.
f = @(x) exp(-x(:)/2).*(5*sin(sqrt(7)*x(:)/2)+...
sqrt(7)*cos(sqrt(7)*x(:)/2))/(2*sqrt(7))-0.5;
rng(1)
data = f(t)+0.01*randn(L,1); % add Gaussian noise
k = unique(randi([1,L],1,ceil(L*0.15))); % drop 15% of samples
data(k) = [];
tt = t; tt(k) = [];
plot(tt,data,'r.',MS,3), grid on, hold on, plot(t,f(t),'b-',LW,1.5)
title(sprintf('Signal with noise and missing samples'))
legend('corrupted data','original signal',LO,NE)
xlabel('time [s]'), ylabel('amplitude')
Here we face two issues. Applying the FFT directly is out of the question, since samples are missing, so we could think of AAA-approximating the noisy data on a regular grid, and exploiting the filtering effect of Lawson iteration at the same time. However, it is difficult to guess a sensible maximum degree, and keep timings reasonable. Here another powerful tool comes to the rescue: Vandermonde with Arnoldi [3] can do away with noise decently in very little time.
[Hes,R] = VAorthog(tt(:),30); y = VAeval(t(:),Hes)*(R\data(:)); err = norm(abs(f(t(:))-y),inf)
err = 0.006742916375749
We now proceed just as above, this time with a limit on the order of the model $F(s)$. We require a 3rd order approximation, the original system being of order 2, plus one pole for the step input, degree 4 in total. The extra pole turns up close to the imaginary axis, with a small residue, indicating it has little moment indeed.
Yf = fft(y).'; hYf = Yf(1:L/2+1)/L; Ff = 2*pi*Fs*(0:L/2)/L; [~,polF] = aaa([fliplr(conj(hYf)) hYf],[-fliplr(1i*Ff) 1i*Ff],'degree',4,'lawson',0); polF = roots(real(poly(polF))); % pole recomputation k = find(real(polF)>0); polF(k) = -polF(k)'; % force system stability, Re>0 polF(abs(polF)>max(Ff)) = []; % expunge nonsense frequencies [~,k] = min(abs(polF)); polF(k) = 0 % fix pole of step input Qf = exp(tt(:)*polF.'); % residues from corrupted data resF = Qf\data
polF = -2.077322580676582 + 0.000000000000000i -0.493718687049510 + 1.329673520062673i -0.493718687049510 - 1.329673520062673i 0.000000000000000 + 0.000000000000000i resF = 0.027403005131056 - 0.000000000000000i 0.239000734016995 - 0.469347419352371i 0.239000734016995 + 0.469347419352370i -0.499909818820932 + 0.000000000000000i
The original, uncorrupted signal is decently restored, and the LTI system identified.
ff = @(x) (exp(x(:)*polF.'))*resF; % step response of identified system
err = norm(abs(f(t)-ff(t)),inf) % deviation from uncorrupted step response
plot(t,ff(t),'k--',LW,1.5), hold off
title(sprintf(['Signal with noise and missing samples\n' ...
'error in original signal = %d'],err))
legend('corrupted data','original signal','step response of LTI model',LO,NE)
disp('For this example:'), toc
err = 0.005494654344113 For this example: Elapsed time is 3.025857 seconds.
[1] S. Costa and L. N. Trefethen, AAA-least squares rational approximation and solution of Laplace problems, Proceedings of the 8ECM, 2021.
[2] I. V. Gosea and S. Güttel, Algorithms for the rational approximation of matrix-valued functions, SIAM J. Sci. Comput., 43 (2021).
[3] P. D. Brubeck, Y. Nakatsukasa, and L. N. Trefethen, Vandermonde with Arnoldi, SIAM Rev., 63 (2021).